Новая уникальная разработка ученых из Германии и США

Новая разработка ученых из Германии и США – электрогидравлический привод, работающий, как ноги у паука, – стала новым шагом на пути создания уникальной робототехники. В результате совместной работы ученых двух стран был создан сверхлёгкий электрогидравлический привод с трёхпалым мягким захватом.
Читайте также: Сюрприз от Edeka: в Германии откроется магазин, где работают только роботы (+видео).
Привод, имеющий вес 1,3г, способен поднимать объект весом 20 г на расстояние 10 см от точки вращения. Роботизированное устройство, состоящее из нескольких объединенных SES, обладает способностью прыгать.
Новая разработка ученых Германии и США. Идею подсказала природа
Часто создатели роботов-манипуляторов обращаются к анатомическому строению членистоногих и моллюсков. И этому имеется подтверждение. Известно, что в 2016 году инженерами из университета в Гарварде был создан первый в мире автономный мягкий робот-осьминог. 
Новая разработка ученых из Германии: особенности конструкции
В новом исследовании немецкие и американские ученые при разработке мягкого робота взяли за основу принцип гидравлики паучьих ног и внедрили его в свое устройство. В конструкцию созданного инженерами нового детища входят следующие элементы:
- пластиковая основа, на которой крепятся элементы;
- гибкий резервуар, наполненный жидким диэлектриком;
- два электрода, интегрированных в диэлектрик.
Этапы сборки робота
Сборка устройства проходила в несколько этапов. Сначала создатели сделали резервуар для диэлектрика. Для этого методом сварки были соединены бока двух слоев пленки и оставлено отверстие, необходимое для заполнения емкости жидкостью. При отрезании лишней пленки была оставлена «юбка» снизу и по бокам. Это было необходимо, чтобы при работе устройства не возникала электрическая дуга. Затем на двух противоположных сторонах пленочного резервуара закрепили углеродные электроды, интегрированные в диэлектрик. На следующем этапе шарнирный слой гибкого соединения был скреплен с двухкомпонентным слоем жесткости слоем специального клея. Далее резервуар был прикреплен к гибкому соединению, заполнен диэлектриком с последующим свариванием отверстия, через которое подавалась жидкость.
Особенности работы электропривода
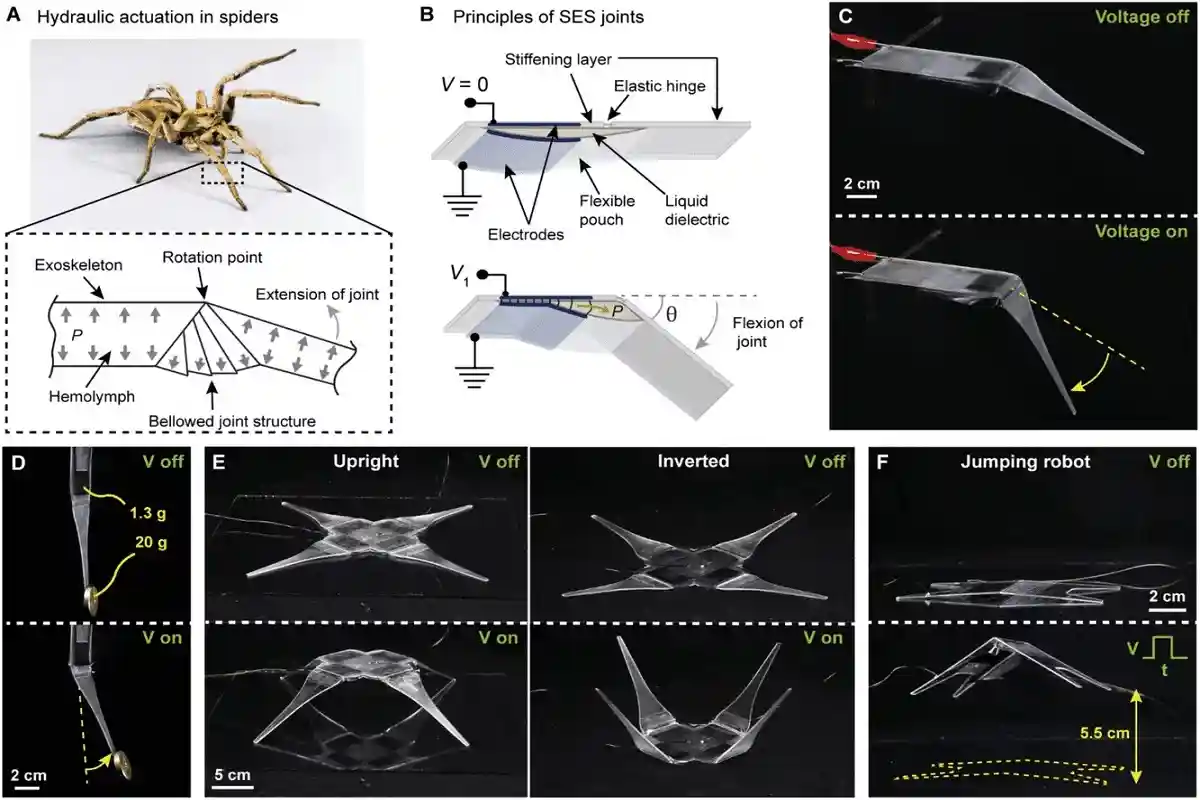 Устройство работает по следующему принципу. Когда подается высокое напряжение, электроды, интегрированные в резервуар с жидким диэлектриком, создают давление. Под его воздействием жидкость перекачивается в область, которая не покрыта электродом. Под воздействием гидростатического давления происходят сгибание и разгибание сустава. При этом, чем выше напряжение, тем активнее «паучья лапа» совершает движения.
Устройство работает по следующему принципу. Когда подается высокое напряжение, электроды, интегрированные в резервуар с жидким диэлектриком, создают давление. Под его воздействием жидкость перекачивается в область, которая не покрыта электродом. Под воздействием гидростатического давления происходят сгибание и разгибание сустава. При этом, чем выше напряжение, тем активнее «паучья лапа» совершает движения.
Новая разработка ученых Германии и США.Что показали испытания?
При тестировании созданного устройства исследователями из Германии и США были проведены сравнения по величине потребляемых мощностей между SES и сервоприводом, который имеет аналогичную номинальную мощность. Для обоих приводов проводились испытания в следующих условиях:
- фиксация на 0°;
- последующее перемещение и удержание веса под углом 25°(несколько секунд); дальнейшее возвращением на 0°.
Результаты испытаний показали следующее. Для перемещения на угол 25° сервоприводу требуется 450 мВт. А SES справляется с этой работой с более низкими затратами – 80 мВт. Для удержания сервопривода на угле 25° потребовалось 140 мВт, а SES было достаточно 1 мВт. Выйдя на угол 0°, потребление сервопривода составляло около 80 мВт. А вот возвращение энергии из SES в систему может осуществляться с помощью схемы восстановления заряда.
Трехпалый захват: история создания
Как появилась новая разработка ученых Германии и США? На следующем этапе группа ученых из Германии и США приступила к созданию трехпалого захвата. В каждом «лепестке» конической формы находится 3 привода, соединенных внутренним электродом (заземлением) и независимыми внешними электродами. Чтобы обеспечить поддержание крутящего момента для подъема остальных приводов, самый большой привод располагается в основании конструкции. Для создания трехпалого роботизированного захвата ученые собрали «лепестки». Затем его концы оснастили деформируемым эффектором для обеспечения большей площади контакта при захвате и поверхности трения.
Тестирование показало, что при отсутствии нагрузки конструкция сгибалась до угла 180°, а при поворачивании ее внутренней стороной к поверхности она поднималась вверх. Во время испытаний перед захватом стояла задача собрать предметы разного веса, с которой он отлично справился. Механизм легко поднимал кружку (270 г), клубнику (18 г), яблоко (170 г). При работе в горизонтальном положении привод собирал клубнику с напряжением 6 кВ, а при работе в вертикальном направлении этот показатель был чуть больше и составил 8 кВ, независимо от типа собираемых предметов.
Перспективы разработки
Авторы, которыми была создана новая разработка ученых Германии и США, считают, что разработка подходит для создания конструкций, имеющих разные геометрию и характеристики срабатывания. Исследователи хотят создать полноценный привод «паук» с электрогидравлическими приводами. В дальнейшем его можно будет интегрировать в любые типы роботов. Разработчики пророчат приводам SES большое будущее и считают, что они найдут применение в производстве минироботов, размер которых составляет всего несколько сантиметров и имеет ограниченную площадь для размещения. Существенным преимуществом SES является экономное потребление энергии. Оно в разы меньше, по сравнению с сервоприводами. Поэтому уже сегодня становится ясно, что электрогидравлический привод «паучьи ноги» стал новым шагом к созданию уникальных роботов.
Читайте также:
- Роботы, которые помогают бороться с COVIDом
- На дорогах Германии могут появиться первые роботакси
- Зверобойный зелёный катализатор — открытие в Германии

Читайте также:

Обсуждение
Самые последние новости